
Launch Environment Data Logger
Background
 At the start of satellite manufacturing the only satellites that made it to space cost millions of dollars to create and then cost millions more to launch. This meant that only large companies that had deep pockets, or the government, were able to design, build, and launch satellites. With the primary satellite installed, typically in the nose cone of the launch vehicle, the rocket is balanced with ballast weights to ensure that it flies in the correct path. After the satellite is delivered to orbit, the rocket, including the ballast weight, returns to earth and burns up on reentry. The initial concept of CubeSats was created from the idea that instead of using dead weight that burns up; ride-share payloads could act as the ballast. The launch provider would market spots on the rocket for a price and small payloads could get a ride into space. These additional payloads became the original CubeSats, creating a beneficial relationship between the launch service provider, the primary payload, and the research group that would like to design a small satellite.
At the start of satellite manufacturing the only satellites that made it to space cost millions of dollars to create and then cost millions more to launch. This meant that only large companies that had deep pockets, or the government, were able to design, build, and launch satellites. With the primary satellite installed, typically in the nose cone of the launch vehicle, the rocket is balanced with ballast weights to ensure that it flies in the correct path. After the satellite is delivered to orbit, the rocket, including the ballast weight, returns to earth and burns up on reentry. The initial concept of CubeSats was created from the idea that instead of using dead weight that burns up; ride-share payloads could act as the ballast. The launch provider would market spots on the rocket for a price and small payloads could get a ride into space. These additional payloads became the original CubeSats, creating a beneficial relationship between the launch service provider, the primary payload, and the research group that would like to design a small satellite.
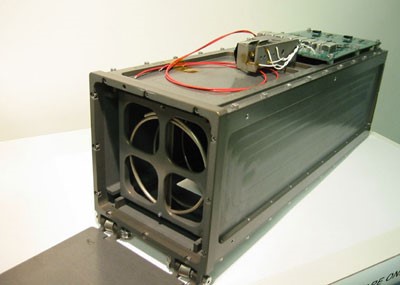
The additional payloads launched are placed in containers called Poly-Picosat Orbital Deployer (P-POD). The P-POD was designed to help keep the main payload and the launch vehicle safe during launch and orbital deployment as well as act as ballast for the launch vehicle which gets bolted near the engines of the launch vehicle. Current environmental data given to CubeSat designers from the CubeSat Design Specifications, references NASA’s General Environmental Verification Specifications (GEVS) and gives a range of expected vibration and thermal profiles for the launch vehicle. Testing to these specifications provides some confidence that the satellite will survive the ride to space and be operational when placed into orbit.
 However, these specifications were written for the environment of the primary payload typically located in the nose cone of the launch vehicle, not the ride-share payloads typically located by the rocket engines. This environment inside the launch vehicle is not well known, it is possible that the payloads will experience a hotter environment and sustain greater vibrations than the primary payload located in the nose cone. As of this moment there have not been any successful attempts to measure the launch environment experienced by CubeSats inside the P-POD. NASA is interested in this data, as it would be valuable to anyone building a CubeSat.
However, these specifications were written for the environment of the primary payload typically located in the nose cone of the launch vehicle, not the ride-share payloads typically located by the rocket engines. This environment inside the launch vehicle is not well known, it is possible that the payloads will experience a hotter environment and sustain greater vibrations than the primary payload located in the nose cone. As of this moment there have not been any successful attempts to measure the launch environment experienced by CubeSats inside the P-POD. NASA is interested in this data, as it would be valuable to anyone building a CubeSat.
LEDL
Overview
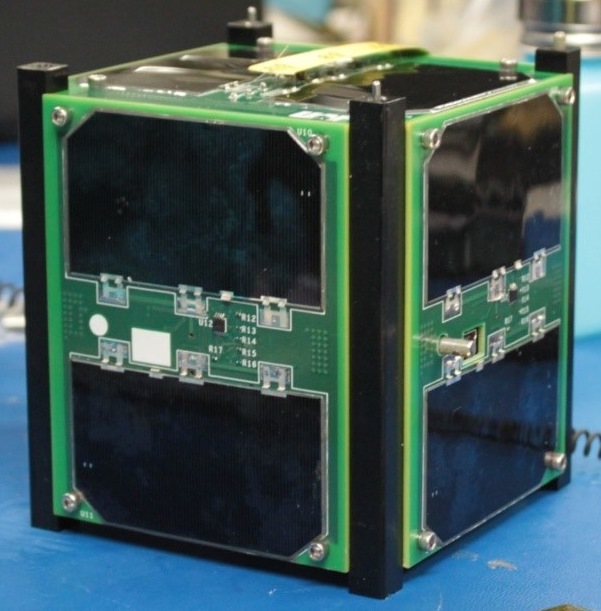
 The Launch Environment Data Logger (LEDL) system was proposed to measure the launch environment. Typically any payloads launched have to be powered off during the ascent and having any system powered during the launch phase is prohibited by the launch service provider. Cal Poly’s CubeSat Design Specification specifies that university payloads must be electrically inert during the vehicle’s launch phase until the CubeSat is placed into orbit. Since the launch provider typically prohibits CubeSats from being electrically active during launch, the Alaska Research CubeSat (ARC2) requires a waiver to be electrically active. In order to acquire the necessary waiver the Alaska Research CubeSat must show that it is not a risk to the launch vehicle or the primary payload. The risk is minimized in part by requiring that LEDL have its own power system so that the rest of the satellite is off.
The Launch Environment Data Logger (LEDL) system was proposed to measure the launch environment. Typically any payloads launched have to be powered off during the ascent and having any system powered during the launch phase is prohibited by the launch service provider. Cal Poly’s CubeSat Design Specification specifies that university payloads must be electrically inert during the vehicle’s launch phase until the CubeSat is placed into orbit. Since the launch provider typically prohibits CubeSats from being electrically active during launch, the Alaska Research CubeSat (ARC2) requires a waiver to be electrically active. In order to acquire the necessary waiver the Alaska Research CubeSat must show that it is not a risk to the launch vehicle or the primary payload. The risk is minimized in part by requiring that LEDL have its own power system so that the rest of the satellite is off.
The ARC2 satellite is expected to sit on the launch pad for six months prior to launch, LEDL will have to be able to identify when launch is happening while in a low power mode. If the LEDL cannot determine when launch has happened it will not be able to log the data. To ensure that LEDL will begin logging data, LEDL will be required to detect launch within 120 seconds of ignition. Once detected, LEDL must verify that there is actually a launch. This is to avoid false launch detections or accidental engagements so that LEDL will only record the environment during an actual launch. To detect launch the LEDL system will utilize piezo electric sensors. The sensors create electrical energy under sustain vibration. The piezo electric sensors will use the vibrations generated during launch to trigger the system to measure the environment.
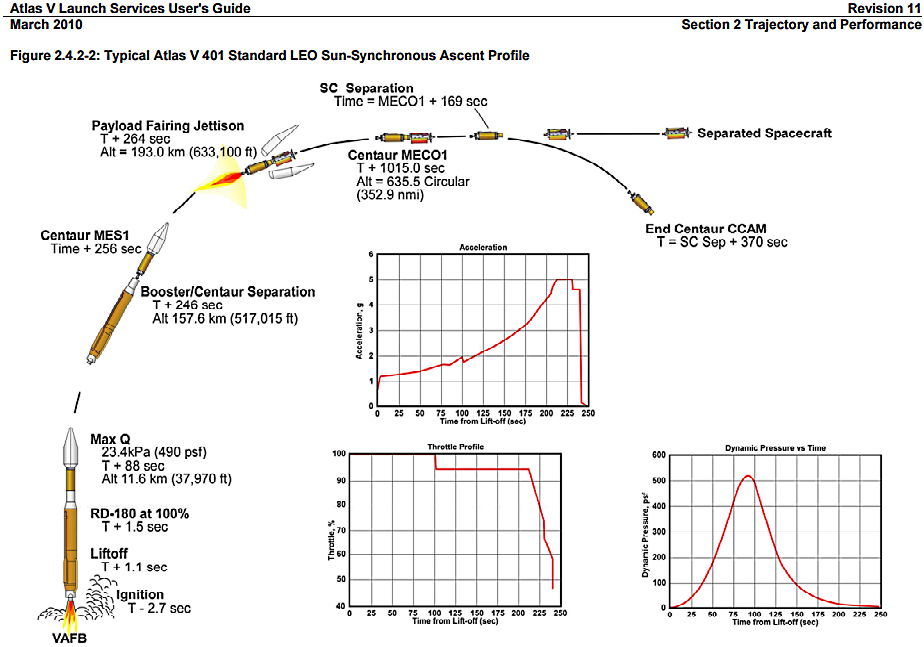 As mentioned the General Environmental Verification Standard (GEVS) provides expected vibration data for spacecraft under 50 kg. Section 2.4.2.3 of GEVS states that the expected frequency range to test the satellite is from 20-2000 Hz and Table 2.4.4 from GEVS shows that the maximum acceptance level for acceleration is 10 Grms for qualification testing. Therefore LEDL must be able to measure at least 10 Grms and for sinusoidal forcing this would require that LEDL be able to measure a peak acceleration of approximately 14 G. The maximum frequency expected for the launch vehicle is 2000 Hz; to prevent aliasing based on Nyquist theorem the data will have to be sampled at least 4000 Hz. In addition, a 100 G accelerometer was included to measure shocks that might be in excess of 25 G. To determine if launch has happened the LEDL system will measure the accelerometer for 120 seconds. As shown in the figure the Atlas V reaches 2 G of acceleration by 120 seconds into the flight path, if the 25 G accelerometer measures 2 G that the LEDL system knows that launch has happened and it will begin to log all launch data.
As mentioned the General Environmental Verification Standard (GEVS) provides expected vibration data for spacecraft under 50 kg. Section 2.4.2.3 of GEVS states that the expected frequency range to test the satellite is from 20-2000 Hz and Table 2.4.4 from GEVS shows that the maximum acceptance level for acceleration is 10 Grms for qualification testing. Therefore LEDL must be able to measure at least 10 Grms and for sinusoidal forcing this would require that LEDL be able to measure a peak acceleration of approximately 14 G. The maximum frequency expected for the launch vehicle is 2000 Hz; to prevent aliasing based on Nyquist theorem the data will have to be sampled at least 4000 Hz. In addition, a 100 G accelerometer was included to measure shocks that might be in excess of 25 G. To determine if launch has happened the LEDL system will measure the accelerometer for 120 seconds. As shown in the figure the Atlas V reaches 2 G of acceleration by 120 seconds into the flight path, if the 25 G accelerometer measures 2 G that the LEDL system knows that launch has happened and it will begin to log all launch data.
Determining the launch vehicle’s temperature is LEDL’s second priority after measuring the acceleration. Current NASA metals with Teflon coating experience touch temperature of 120 C to -129 C in space, but the actual temperature range measured by commercial sensors will be more limited by the components themselves. Most commercial off-the-shelf electronic components tend to have upper and lower bonds of +105 C to -40 C. A temperature sensor that can at least measure within these bounds will be used.
With LEDL being the only system active during launch, LEDL will have to store all data for a later transmission. The amount of data that will be stored for a 2-hour launch window is mostly dependent on the rate the acceleration data needs to be logged. The expected memory usage during launch is 0.5 GB, so an 8 GB SD card was chosen to store all data sampled during launch. After the satellite has reached orbit, the communication system will retrieve the launch data and que it up for data download to the ground station on command.
The LEDL system will also measure gyroscopes to measure the rotation of the satellite and a lumen meter to measure the sunlight intensity. The sensors measured during orbit and the general heath of the satellite will be placed into a beacon. The beacon will then be transmitted from the communication system every 10 seconds. The data will also be stored to memory. The whole satellite path will be recorded for post data analysis of the satellite.
Due to the amount of data stored from Launch, samples will be requested from LEDL throughout the entire launch to get a sample of how the launch changes over time. Data will be filled in as more data is requested from the ground station. Once all data is retrieved, the results of the launch will be published once they are approved by the launch provider. Any other information concerning the launch will be provided to the CubeSat community as requested.